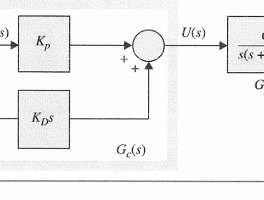
▶ 자연과학/▷ 제어이론 썸네일형 리스트형 【제어이론】 제어이론 목차 제어이론 목차 추천글 : 【물리학】 물리학 목차최근 수정 내역Nyquist theorem (24.09.05)필터 회로 (24.09.05)푸리에 변환은 라플라스 변환의 특수한 경우 (24.08.28)전기산업기사를 취득한 경험을 바탕으로 작성한 글입니다. Ⅰ. 총론1강. 라플라스 변환2강. 제어시스템의 설계3강. 제어시스템의 표현4강. 제어시스템의 안정성5강. Time-domain Response6강. 근궤적7강. Frequency-domain Response8강. 제어시스템의 설계 Ⅱ. 각론신호처리이론기계제어이론전기제어이론MRI 제어우주기술 제어 Ⅲ. 기술고시 풀이 공정설계자동제어 입력 : 2020.04.17 08:20 【제어이론】 8강. 제어시스템의 설계 8강. 제어시스템의 설계 추천글 : 【제어이론】 제어이론 목차 1. PID 제어 [본문]2. PID tuning method [본문] 1. PID 제어 [목차]⑴ 비례 제어기(proportional controller) ⑵ 적분기(integral controller) ⑶ 미분기(derivative controller) ⑷ PD 제어기(PD controller) Figure. 1. PD 제어기를 갖는 제어시스템 ① 특징○ derivative control은 e(t)의 기울기를 측정함 ○ 특성방정식의 차수를 바꾸지 않고 영점을 추가함○ 영점(zero)이 추가되어 근궤적이 이동함 (∵ 근궤적은 영점에 대해서 그려짐)○ KD는 고유 진동주파수 ωn에 영향을 주지 않음○ damping을 개선하고 maxim.. 【제어이론】 7강. Frequency-domain Response 7강. Frequency-domain Response 추천글 : 【제어이론】 제어이론 목차 1. Bode plot [본문]2. Nyquist plot [본문]3. Nichols plot [본문] 1. 보데 플롯(Bode plot) [목차]⑴ 정의 : 가로축을 ω, log10ω 또는 ω / ωn으로 표시하고, 세로축을 | M(jω) | 또는 | M(jω) | (dB)로 표시한 그래프 Figure. 1. ω 대 | M(jω) | 그래프와 ω 대 φM(jω) 그래프] ⑵ 장점① 컴퓨터를 사용하지 않고 크기 및 위상을 근사적으로 그릴 수 있음② Nyquist 선도에 비해 이득교차점, 위상교차점, 이득여유, 위상여유를 구할 수 있음③ Nyquist 선도에 비해 설계 목적을 위한 제어기 설계가 용이함⑶ 단점① 오.. 【제어이론】 6강. 근궤적 6강. 근궤적(root locus) 추천글 : 【제어이론】 제어이론 목차 1. 문제 상황 [본문]2. 극점 조사 [본문]3. 영점 조사 [본문]4. 독립된 근궤적의 개수 [본문]5. 근궤적의 대칭성 [본문]6. 점근선의 각도 [본문]7. 점근선의 교점 [본문]8. 근궤적과 실수축의 교점 [본문]9. 출발각 [본문]10. 근궤적과 허수축의 교점 [본문]11. 이탈점 [본문]12. K의 값 계산 [본문]a. 근궤적 연습문제 1. 문제 상황 [목차]⑴ 다음과 같은 전달함수를 갖는 single-loop control system의 영점의 근궤적을 구하려고 함 ⑵ G1, H1, P, Q의 도입하여 특성방정식 F를 표시함 : F는 특성방정식인 Δ(s)를 의미함 ① G(s)H(s) 식에 K 항이 포함돼 있어야 .. 【제어이론】 5강. Time-domain Response 5강. Time-domain Response 추천글 : 【제어이론】 제어이론 목차 1. 퍼포먼스 파라미터 [본문]2. 제어시스템의 유형 [본문] 1. 퍼포먼스 파라미터 [목차]⑴ 파라미터 정의 Figure. 1. 단위 계단 입력에 대한 제어 시스템의 시간 도메인 퍼포먼스] ① 표준형 2차 시스템 : 고유 진동주파수 ωn, 감쇠비 ζ에 대하여, ② 지연 시간(delay time) : 최종 값의 50%에 이르는 시간. td로 표시함③ 상승 시간(rise time) : 최종 값의 10%와 90%에 이르는 시간 차이. tr로 표시함④ 조정 시간(setting time) : 출력 신호가 목표치로부터 5% 이내에서만 도달하게 되는 최초의 시간. ts로 표시함⑤ 정상상태 오차(steady-state error).. 【제어이론】 4강. 제어시스템의 안정성 4강. 제어시스템의 안정성 추천글 : 【제어이론】 제어이론 목차 1. 개요 [본문]2. Routh-Hurwitz criterion [본문]3. 기타 안정성 판정법 [본문] 1. 개요 [목차]⑴ 절대적 안정성 : 주어진 시스템이 안정한지 불안정한지에 대한 기준① 미분방정식의 해 : 과도해와 특해의 합으로 표현됨 ○ 과도해(transient solution) : 입력이 0일 때의 반응. 제차해(homogeneous solution)라고도 함○ 특해(particular solution) : 입력에 대한 반응. 정상해(steady-state solution)라고도 함② 미분방정식을 라플라스 변환으로 변환시킨 뒤 s의 해를 구하면 σi ± jωi와 같이 표현할 수 있음③ 유형 1. 점근적 안정(asymptoti.. 【제어이론】 3강. 제어시스템의 표현 3강. 제어시스템의 표현 추천글 : 【제어이론】 제어이론 목차1. 개요 [본문]2. 제어시스템의 요소 [본문]3. 표현 방법 1. 블록다이어그램 [본문]4. 표현 방법 2. 신호흐름선도 [본문] 1. 개요 [목차]⑴ 선형 시스템 : 중첩의 원리가 적용될 수 있는 시스템 (예 : time-invariant system)⑵ 비선형 시스템 : 중첩의 원리가 적용될 수 없는 시스템 (예 : friction system, time-varying system)⑶ 중첩의 원리(principle of superposition) : 입력이 여러 개가 있을 때 출력은 각 입력이 단독으로 만드는 각 출력의 합임 ⑷ 이득(gain) : 출력 / 입력으로 정의 2. 제어 시스템의 요소 [목차]⑴ 요소 1. 파라미터(par.. 【제어이론】 2강. 제어시스템의 설계 2강. 제어시스템의 설계 추천글 : 【제어이론】 제어이론 목차1. 역학적 시스템의 설계 [본문]2. 전기 시스템의 설계 [본문]3. 유체 시스템의 설계 [본문]4. 열 시스템의 설계 [본문]5. 물질전달 시스템의 설계 [본문] 1. 역학적 시스템의 설계 [목차]⑴ 개요 : 자율주행 제어, 우주로켓 자세 제어, 스마트폰 카메라 진동 제어 등에서 활용⑵ 유형 1. 선형 병진 시스템① 관련 방정식 ② 예제Figure. 1. 선형 병진 시스템] ⑶ 유형 2. 역학적 회전 시스템① 관련 방정식 ② 예제 1. 전동기 제어 시스템 Figure. 2. 전동기 제어 시스템] ③ 예제 2. 치차열 시스템 Figure. 3. 치차열 시스템] ○ 2번 식이 성립하는 이유 : 작용력과 반작용력은 힘의 크기가 같아야 함.. 이전 1 2 다음







최근댓글